Vehicle Detection

Vehicle Detection Project
###Histogram of Oriented Gradients (HOG)
####1.HOG features extraction from the training images.
The code for this step is contained in the first code cell 24 of the IPython notebook.
I started by reading in all the vehicle and non-vehicle images. Here is an example of one of each of the vehicle and non-vehicle classes:

I then explored different color spaces and different skimage.hog() parameters (orientations, pixels_per_cell, and cells_per_block). I grabbed random images and displayed them to get a feel for what the skimage.hog() output looks like.
Here is an example using the Gray image and HOG parameters of orientations=8, pixels_per_cell=(8, 8) and cells_per_block=(2, 2):

####2. Choice of HOG parameters.
I tried various combinations of parameters for orientation, pixel_per_cell but kept cell_per_block constant at (2,2) and tried expermenting with SVM and RandomForest classifier to check thier accuracy. I got the maximum accuracy with pixel per cell at (8,8) and oreintation at 8
####3. Training a classifier using your selected HOG features and color features (cell 36).
With Hog features, I also used HSV colorspace spatial fetaures as shown below
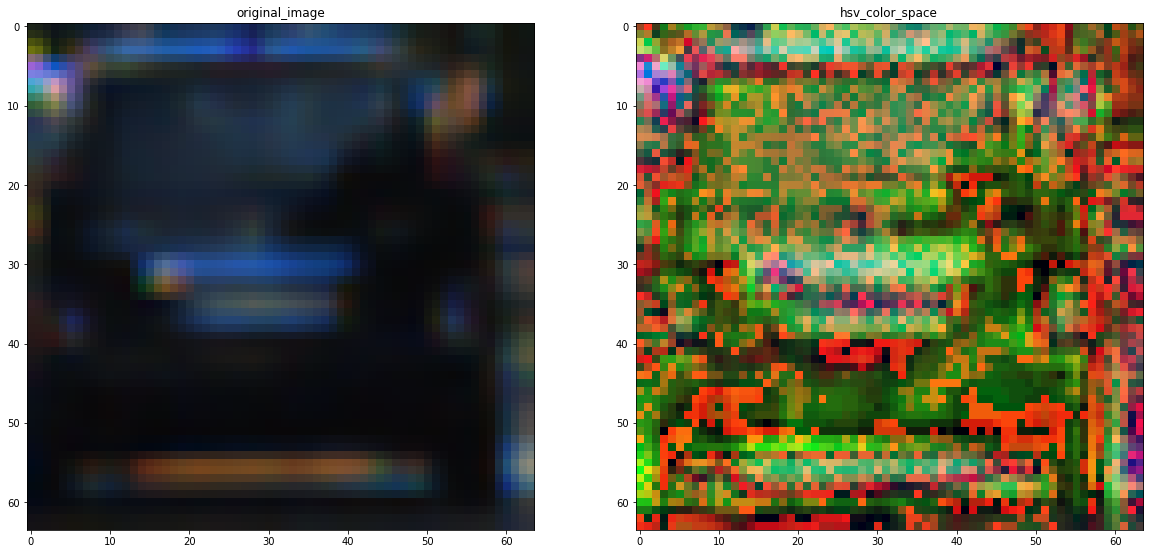
and also histogram features in HSV and RGB colorspace using 8 bins for each channel. I normalized all the features as shown below to avoid bias in weights.
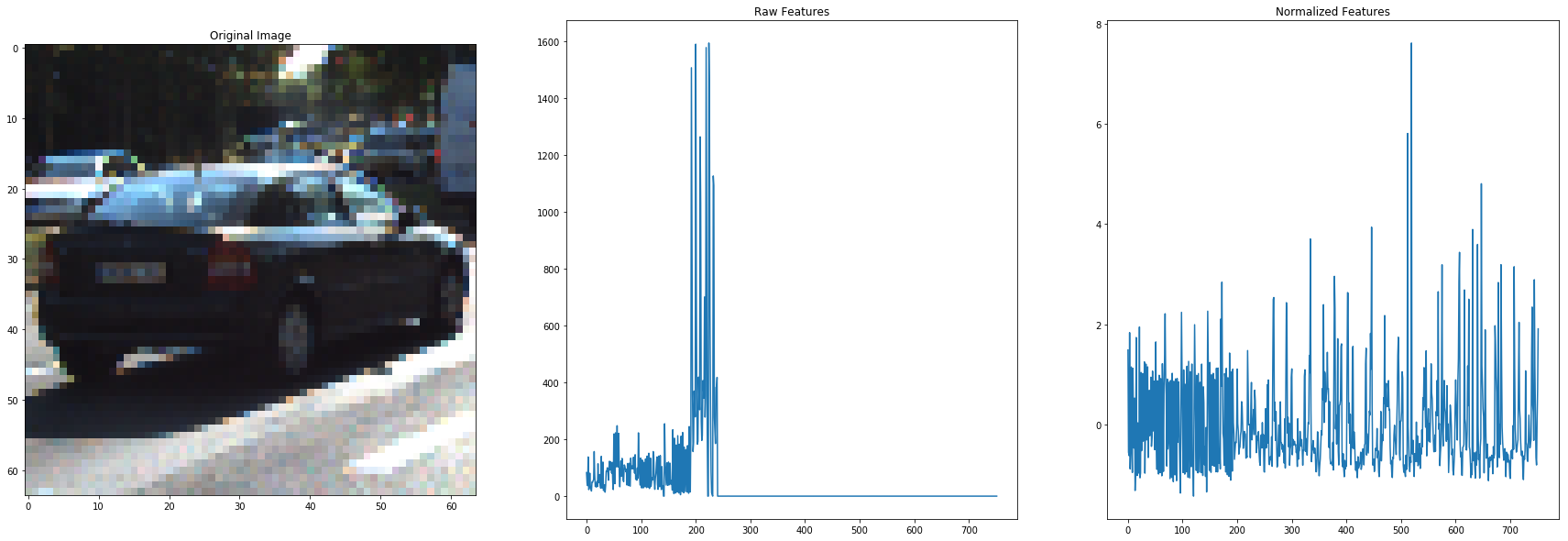
I trained a linear SVM and Random Forest using this normalized data. The best accuracy of the classifier were:
- SVM : 0.981981981982
- Random Forest : 0.989301801802 So I choose to go forward with Randomforest
Sliding Window Search
####1. sliding window search. (cell 42)
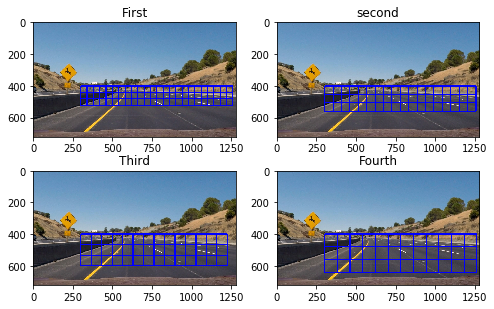
I tried to scale the window in four sizes, to detect car near as well as far way. The four scales are shown below
Scales = ( 1, 1.25, 1.5, 1.75 )
The range of window size was from (80,160) while the region searched was x in (300,1280) while y in (400,700)
Please see the four scale in the image below
!
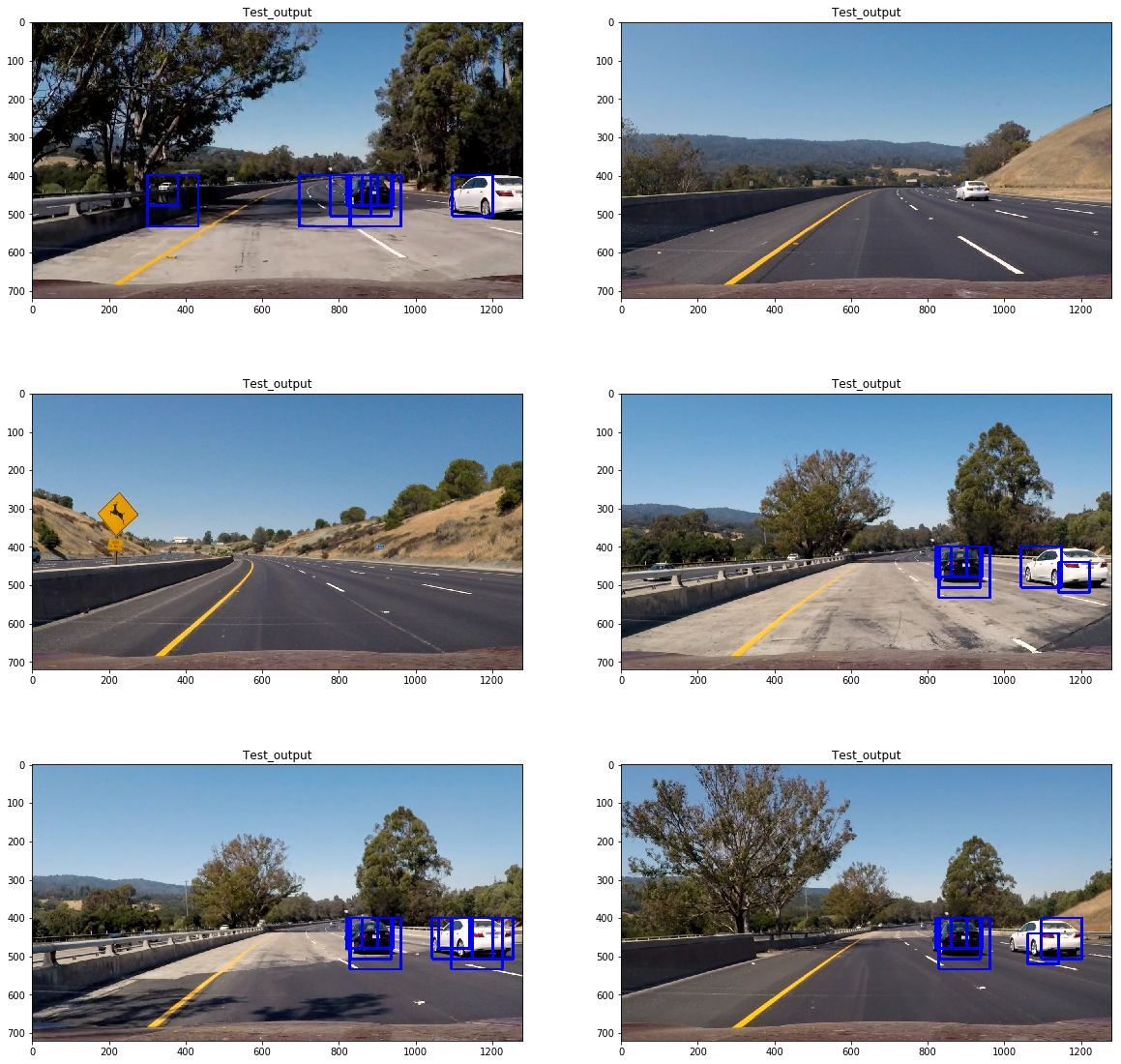
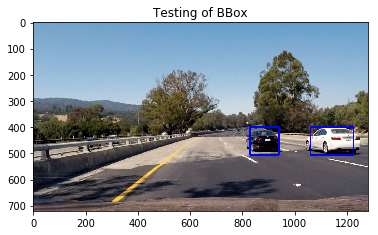
####2. test images to demonstrate how pipeline is working.
With Hog features, I also used HSV colorspace spatial fetaures as shown below and also histogram features in HSV and RGB colorspace using 8 bins for each channel.I normalized all the features to avoid bias in weights.
Please see the below image to see the results.
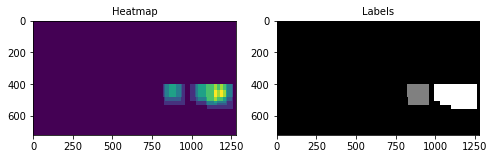
Heat Maps (Cell 53):
I created heatmaps based upon the prediction of the classifier to avoid overlapping windows and false positive as shown in lecture. I recorded the positions of positive detections in each frame of the video. From the positive detections I created a heatmap and then thresholded that map to identify vehicle positions. I then used scipy.ndimage.measurements.label() to identify individual blobs in the heatmap. I then assumed each blob corresponded to a vehicle. I constructed bounding boxes to cover the area of each blob detected.
The high probability of finding a car was found using thresholding this heatmap.
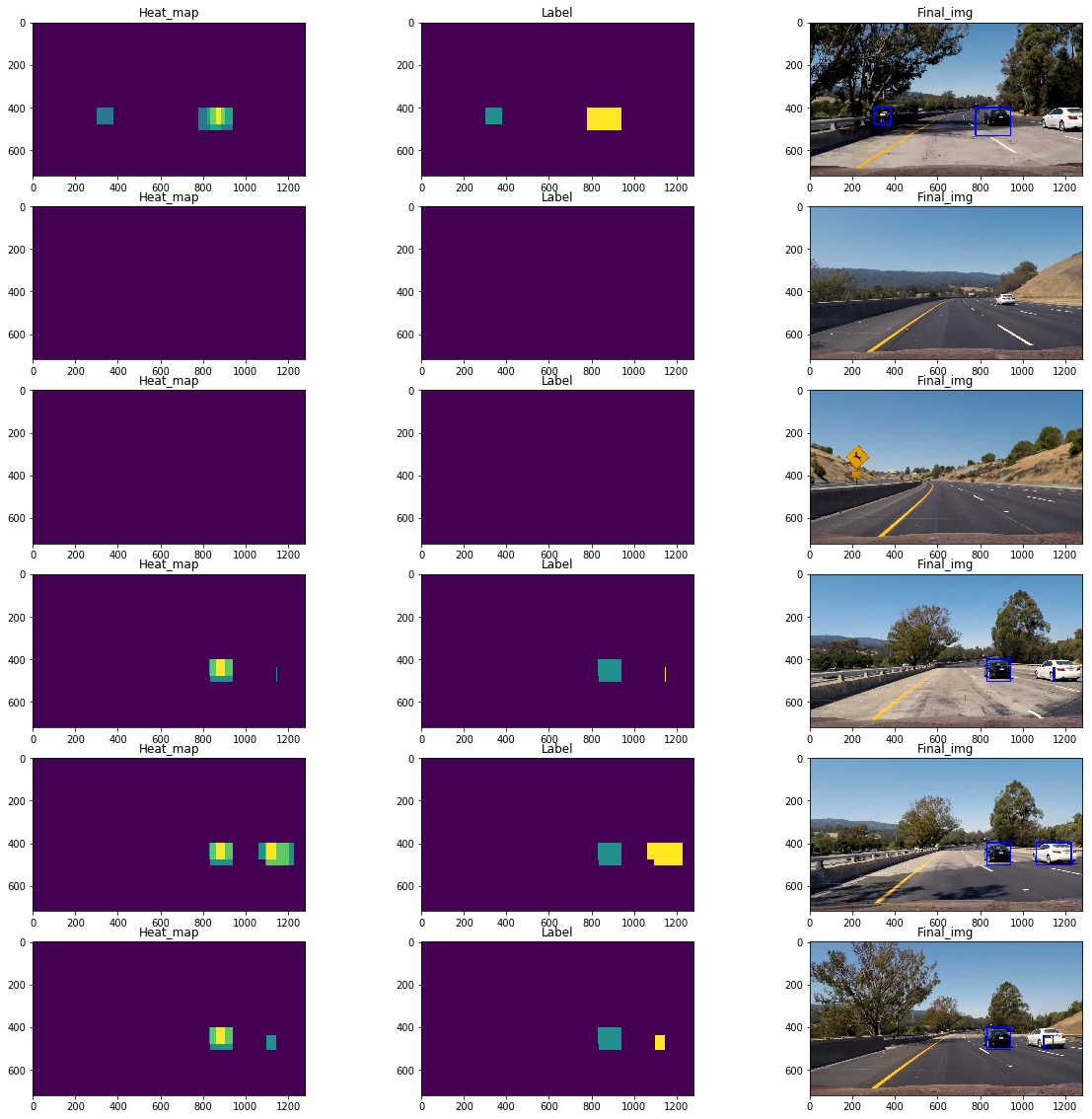
Heatmaps:
Final_test_image
###Here the resulting bounding boxes are drawn onto the last frame in the series:
Here is the output of scipy.ndimage.measurements.label() on the integrated heatmap from all six frames:
Video Implementation
####1. Final video output.
Here’s a link to my video result
###Discussion
####1. Briefly discuss any problems / issues you faced in your implementation of this project. Where will your pipeline likely fail? What could you do to make it more robust?
- The window search technique can be improved by using probabisitic distribution which could reduce the latency of the pipeline
- The sclaing of the window need to set correctly to get accurate result. Could be improved by ising dynamic scaling once a vehicle is detected.
- Different sclaing in X and Y may also provide good results as car shapes are flat.