Final project of the Udacity Self-Driving Car Nanodegree: Programming a Real Self-Driving Car. For more information about the project, see the project introduction here.
Submission
Sanket Gujar (srgujar (at) wpi.edu)
Introduction
Carla use waypoint navigation to drive autonomously while avoiding obstacles and stopping at traffic lights. Waypoints are ordered set of coordinated that Carla uses to plan a path. Each waypoint has a associated target velocity which depends on the desired vehicle behavior. There are 3 modules implementation for this project:
-
Perception:
a. Traffic light detection
b. Obstacle detection
-
Planning:
Waypoint Updater (Set the velocity for each waypoint)
-
Contol:
Controls the car’s throttle, steering, and brake using Dataspeed Drive by wire (DBW) ROS node.
Architecture
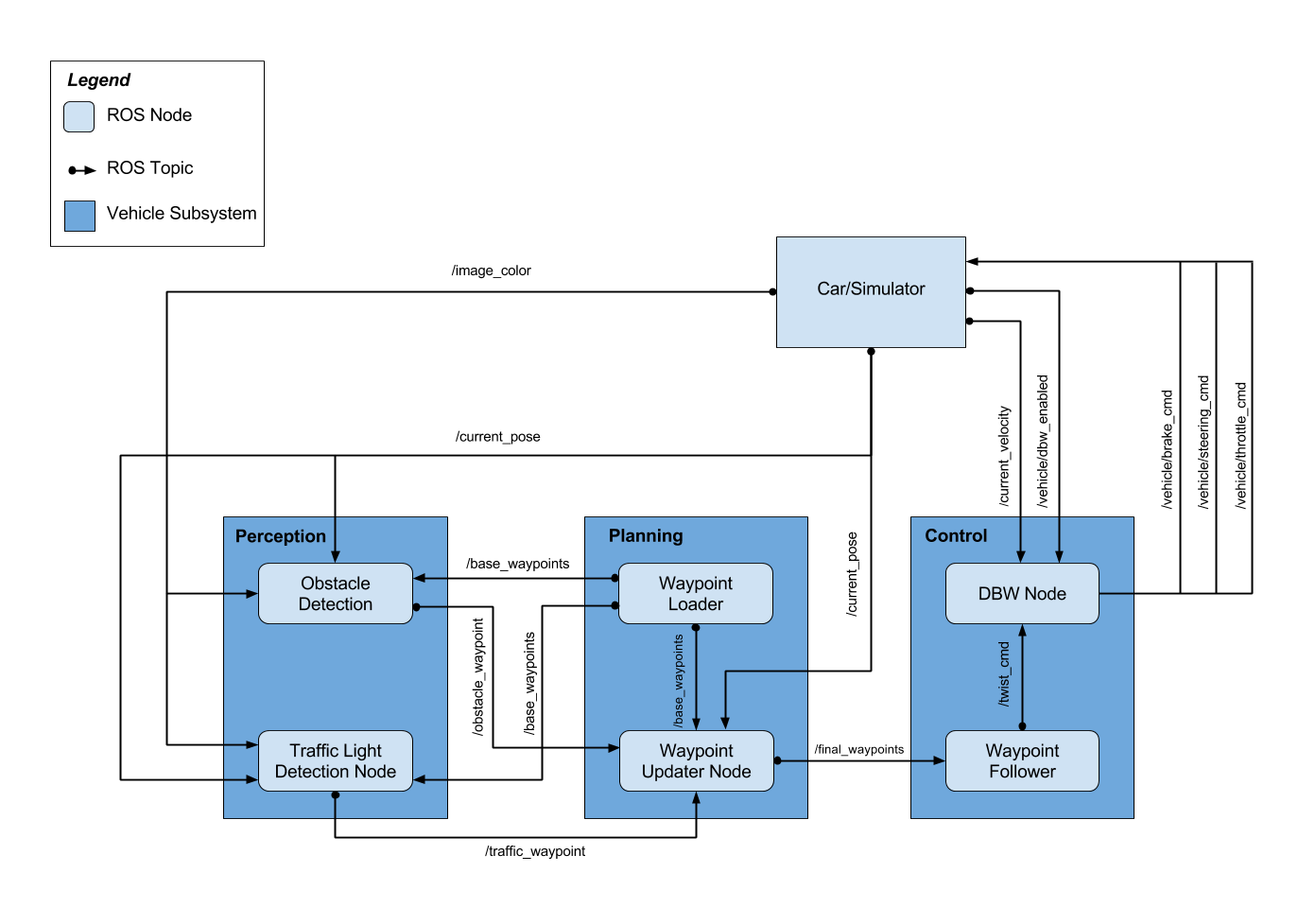
Perception
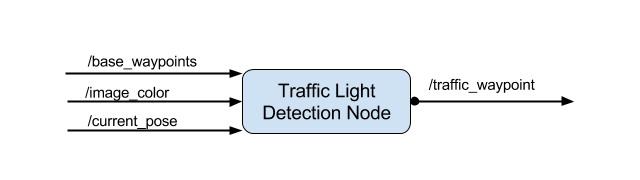
| Topic | Info |
|---|---|
| /traffic_waypoint | index of the waypoint for nearest upcoming red light’s stop line |
| /current_pose | Provides the current position |
| /base_waypoints | list of waypoints the car will be following |
| /image_color | image stream from the car’s camera |
| /vehicle/traffic_lights | (x, y, z) coordinates of all traffic light |
Planning
The purpose of this node is to update the target velocity property of each waypoint based on traffic light and obstacle detection. It will publish a list of waypoints ahead of the car with target velocities to the /final_waypoints topic.
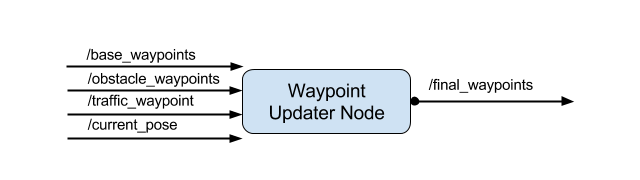
| Topic | Info | Type |
|---|---|---|
| /final_waypoint | list of waypoints ahead of the car with target velocities | styx_msgs/Lane |
| /obstacle_waypoint | location to stop for obstacle | |
| /traffic_waypoint | location to stop for red light | |
| /current_pose | Provides the current position | geometry_msgs/PoseStamped |
| /base_waypoints | list of waypoints the car will be following provided by a static .csv file | styx_msgs/Lane |
The /base_waypoints topic publishes a list of all waypoints for the track, so this list includes waypoints both before and after the vehicle.
/basewaypoints contain a header and a Waypoint list named waypoints. Each waypoint has pose and twist data. twist.twist data contains 3D linear and angular velocities.
I used KDTree to find the waypoints that are closest to the car.
Controls
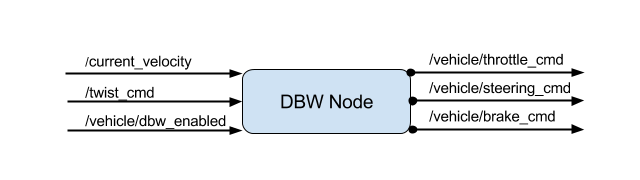
Carla is equipped with a drive-by-wire (dbw) system, meaning the throttle, brake, and steering have electronic control. This package contains the files that are responsible for control of the vehicle: the node dbw_node.py and the file twist_controller.py, along with a pid and lowpass filter. The dbw_node subscribes to the /current_velocity topic along with the /twist_cmd topic to receive target linear and angular velocities. Additionally, this node will subscribe to /vehicle/dbw_enabled, which indicates if the car is under dbw or driver control. This node will publish throttle, brake, and steering commands to the /vehicle/throttle_cmd, /vehicle/brake_cmd, and /vehicle/steering_cmd topics.
Throttle values passed to publish are in the range 0 to 1, a throttle of 1 means the vehicle throttle will be fully engaged. Brake values passed to publish is in units of torque (N*m). The correct values for brake is computed using the desired acceleration, weight of the vehicle, and wheel radius.
brake = deceleration x vehicle mass x wheel radius
| Topic | Info |
|---|---|
| /current_velocity and /twist_cmd | target linear and angular velocity |
| /vehicle/dbw_enabled | car control under dbw or manual |
Installation
Please use one of the two installation options, either native or docker installation.
Native Installation
- Be sure that your workstation is running Ubuntu 16.04 Xenial Xerus or Ubuntu 14.04 Trusty Tahir. Ubuntu downloads can be found here.
- If using a Virtual Machine to install Ubuntu, use the following configuration as minimum:
- 2 CPU
- 2 GB system memory
- 25 GB of free hard drive space
The Udacity provided virtual machine has ROS and Dataspeed DBW already installed, so you can skip the next two steps if you are using this.
- Follow these instructions to install ROS
- ROS Kinetic if you have Ubuntu 16.04.
- ROS Indigo if you have Ubuntu 14.04.
- Dataspeed DBW
- Use this option to install the SDK on a workstation that already has ROS installed: One Line SDK Install (binary)
- Download the Udacity Simulator.
Docker Installation
Build the docker container
docker build . -t capstone
Run the docker file
docker run -p 4567:4567 -v $PWD:/capstone -v /tmp/log:/root/.ros/ --rm -it capstone
Port Forwarding
To set up port forwarding, please refer to the instructions from term 2
Usage
- Clone the project repository
git clone https://github.com/udacity/CarND-Capstone.git - Install python dependencies
cd CarND-Capstone pip install -r requirements.txt - Make and run styx
cd ros catkin_make source devel/setup.sh roslaunch launch/styx.launch - Run the simulator
Real world testing
- Download training bag that was recorded on the Udacity self-driving car.
- Unzip the file
unzip traffic_light_bag_file.zip - Play the bag file
rosbag play -l traffic_light_bag_file/traffic_light_training.bag - Launch your project in site mode
cd CarND-Capstone/ros roslaunch launch/site.launch - Confirm that traffic light detection works on real life images
run the following commands if you get dbw error messages
sudo apt-get update
sudo apt-get install -y ros-kinetic-dbw-mkz-msgs
cd /home/workspace/CarND-Capstone/ros
rosdep install --from-paths src --ignore-src --rosdistro=kinetic -y
Attributions
-https://becominghuman.ai/traffic-light-detection-tensorflow-api-c75fdbadac62
-https://github.com/mkoehnke/CarND-Capstone-TrafficLightDetection